Policy Gradient Methods
Defining the Problem before Writing Code
Assuming that you have a basic understanding of (deep) reinforcement learning, we can dive into the problem at hand. If you're not familiar with the concepts, I suggest reading this post before proceeding.
A Quick Recap of the Setup
We have an agent that interacts with an environment, taking actions at state using a policy . This policy determines the probability of taking action at state . The agent then receives a reward , which is also referred to as , along with a new state . The ultimate goal of the agent is to maximize the total reward, i.e., .
In deep reinforcement learning, we use a parametrized policy network, denoted by , to represent .
Formulating the Objective Function in Policy Gradient Methods
The more natural way to formulate the objective function is to maximize the expected reward of following the policy . For this purpose, we define an objective function that maximizes the expected reward with respect to the policy parameters :
However, it's often not possible to compute this expectation as the transition probabilities and the reward function are typically unknown. Instead, we can approximate by running simulations using our policy and computing the average reward as:
Where the trajectory .
Formulating the Objective Function in Policy Gradient Methods
To maximize the expected reward of following a policy, we can formulate the objective function as , where represents the policy parameters.
The objective function can be defined as:
where is a trajectory, and represents the policy.
However, it's often not possible to compute this expectation as the transition probabilities and the reward function are typically unknown. Instead, we can approximate by sampling trajectories from and computing the average reward as:
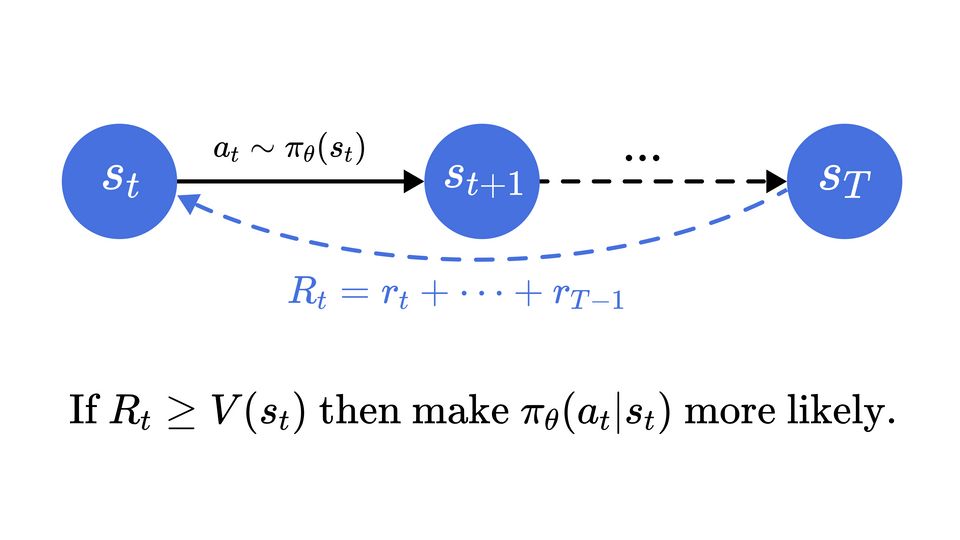
The idea behind policy gradient
The idea behind this method is to run several simulations using a parametrized policy and update the parameters to maximize the "good" decisions and minimize the "bad" decisions. The "good" and "bad" decisions are defined by the reward function .
The more natural way to formulate the objective function is by trying to maximize the expected reward of the policy . Let be the objective function which aims to maximize with respect to the policy parameters :
Unfortunately, we cannot compute this expectation as we usually do not know the transition probabilities and the reward function . We can only sample trajectories from the policy and compute the average reward:
Agent class
It will be used to train a policy network and a baseline network (if required) and make predictions of actions and values based on observations with respect to these networks.
class Agent(pl.LightningModule):
def __init__(self, obs_dim, act_dim, use_baseline=False):
super().__init__()
self.use_baseline = use_baseline
self.baseline_nn = nn.Sequential(nn.Linear(obs_dim, 64), nn.Tanh(), nn.Linear(64, 64), nn.Tanh(), nn.Linear(64, act_dim))
self.policy_nn = nn.Sequential(nn.Linear(obs_dim, 64), nn.Tanh(), nn.Linear(64, 64), nn.Tanh(), nn.Linear(64, act_dim))
self.policy_logstd = nn.Parameter(torch.zeros(act_dim, dtype=torch.float32))
def _policy_forward(self, obs):
mean = self.policy_nn(obs)
scale_tril = torch.diag(torch.exp(self.policy_logstd))
return torch.distributions.MultivariateNormal(mean, scale_tril=scale_tril)
def _baseline_forward(self, obs):
return self.baseline_nn(obs).squeeze()
def _policy_loss(self, batch):
obs, acts, advs, q_vals, dones, rewards = batch
pred_distrib = self._policy_forward(obs)
loss = -(pred_distrib.log_prob(acts) * advs).sum()
return loss
def _baseline_loss(self, batch):
obs, acts, advs, q_vals, dones, rewards = batch
pred_val = self._baseline_forward(obs)
loss = nn.functional.mse_loss(pred_val, q_vals)
return loss
# public functions:
def get_action(self, obs):
with torch.no_grad():
return self._policy_forward(torch.Tensor(obs)).sample().numpy()
def predict_values(self, obs):
with torch.no_grad():
return self._baseline_forward(torch.Tensor(obs)).detach().numpy()class AgentPlt(Agent):
def __init__(self, obs_dim, act_dim, use_baseline, lr=0.02):
self.save_hyperparameters()
super().__init__(obs_dim, act_dim, use_baseline)
self.lr = lr
# pytorch-lighting required functions:
def training_step(self, batch, batch_idx, optimizer_idx=0):
if optimizer_idx == 0:
loss = self._policy_loss(batch)
else:
loss = self._baseline_loss(batch)
return loss
def configure_optimizers(self):
policy_opt = optim.Adam([self.policy_logstd, *self.policy_nn.parameters()], lr=self.lr)
baseline_opt = optim.Adam(self.baseline_nn.parameters(), lr=self.lr)
if self.use_baseline:
return [policy_opt, baseline_opt]
else:
return policy_optEnv class
It will be utilized to run a single or multiple simulations based on an agent's behavior.
class Env:
def __init__(self, env_name='CartPole-v1', render=False, max_simulation_length=1000, dirpath=None):
self.env_name = env_name
self.max_simulation_length = max_simulation_length
if render:
self.env = gnwrapper.Monitor(gym.make(env_name, render_mode='rgb_array'), directory=dirpath or env_name, video_callable=lambda _: True)
else:
self.env = gym.make(env_name)
assert isinstance(self.env.action_space, gym.spaces.Box), 'Only continuous environment is supported.'
self.obs_dim = self.env.observation_space.shape[0]
self.act_dim = self.env.action_space.shape[0]
def run_agent(self, agent):
traj = []
obs = self.env.reset()
for _ in range(self.max_simulation_length):
action = agent.get_action(obs)
next_obs, reward, done, info = self.env.step(action)
traj.append([obs, action, reward, done])
obs = next_obs
if done:
break
traj[-1][-1] = True # could be set to False if max_simulation_length is reached
self.env.close()
return trajOn Policy Dataset class
This class will be used to create a fresh dataset at each epoch by running a simulation based with the more recent agent.
class OnPolicyDataset(torch.utils.data.IterableDataset):
def __init__(self, agent, env, use_advantage=False, discount_factor=1, dataset_length=1000, batch_size=None):
super().__init__()
self.agent = agent
self.env = env
self.use_advantage = use_advantage
self.discount_factor = discount_factor
self.dataset_length = dataset_length
self.batch_size = batch_size
def _discounted_cumsum_q_vals(self, rewards):
q_vals = np.array(rewards, dtype=np.float32)
for i in reversed(range(len(rewards) - 1)):
q_vals[i] = rewards[i] + self.discount_factor * q_vals[i + 1]
return q_vals
def _compute_q_vals(self, rewards_list):
q_vals_list = [self._discounted_cumsum_q_vals(rewards) for rewards in rewards_list]
q_vals = np.hstack(q_vals_list) / len(rewards_list)
return q_vals
def _compute_advantages(self, q_values, obs):
values = self.agent.predict_values(obs)
values = values * q_values.std() + q_values.mean() # unnormalize
advs = q_values - values
return advs.astype(np.float32)
def _prepare_dataset(self, trajs):
obs_list, acts_list, rewards_list, dones_list = trajs
obs, acts, rewards, dones = [np.concatenate(col_list) for col_list in trajs]
q_vals = self._compute_q_vals(rewards_list)
advs = self._compute_advantages(q_vals, obs) if self.use_advantage else q_vals
q_vals = (q_vals - q_vals.mean()) / q_vals.std()
advs = (advs - advs.mean()) / advs.std()
obs, acts, advs, q_vals, dones, rewards = map(torch.from_numpy, (obs, acts, advs, q_vals, dones, rewards))
return utils.data.TensorDataset(obs, acts, advs, q_vals, dones, rewards)
def _sample_trajectories(self):
trajs = []
length = 0
while length < self.dataset_length:
traj = self.env.run_agent(self.agent) # run a simulation with the agent
trajs.append((np.array(col, dtype=np.float32) for col in zip(*traj)))
length += len(traj)
trajs = list(zip(*trajs))
return trajs
def _generate_dataset(self):
trajs = self._sample_trajectories()
dataset = self._prepare_dataset(trajs)
return dataset
def __iter__(self):
dataset = self._generate_dataset()
batch_size = len(dataset) if self.batch_size is None else self.batch_size
return iter(utils.data.DataLoader(dataset, batch_size=batch_size))Callbacks
During the training process, callbacks will be utilized to present a progress bar, log information on W&B, and showcase the behavior of the agent at every k-steps.
#@title `EpochProgressBarCb`
class TQDMCb(pl.callbacks.ProgressBarBase):
def on_train_start(self, trainer, pl_module):
self.bar = tqdm(desc='Epoch', dynamic_ncols=True, total=trainer.max_epochs)
def on_train_batch_end(self, trainer, pl_module, outputs, batch, batch_idx):
outputs = [outputs] if not isinstance(outputs, list) else outputs
losses = [output['loss'].item() for output in outputs]
self.bar.set_postfix(dict(zip(['policy_loss', 'baseline_loss'], losses)))
def on_train_epoch_end(self, trainer, pl_module):
self.bar.update(1)#@title `LoggerCb`
class LoggerCb(pl.Callback):
def __init__(self, logger):
self.logger = logger
self.epoch_idx = 0
def _get_reward_list_from_batch(self, batch):
obs, actions, advs, q_vals, dones, raw_rewards = batch
split_cond = np.where(dones)[0][:-1] + 1 # add one to include the last obs
rewards_list = np.split(raw_rewards, split_cond)
return rewards_list
def on_train_batch_end(self, trainer, pl_module, outputs, batch, batch_idx):
rewards_list = self._get_reward_list_from_batch(batch)
outputs = [outputs] if not isinstance(outputs, list) else outputs
losses = [output['loss'].item() for output in outputs]
self.logger.log_metrics({
**{f'rewards/{i}': sum(rewards) for i, rewards in enumerate(rewards_list)},
**{f'episode_length/{i}': len(rewards) for i, rewards in enumerate(rewards_list)},
**dict(zip(['policy_loss', 'baseline_loss'], losses)),
'epoch': self.epoch_idx,
})
def on_train_epoch_end(self, trainer, pl_module):
self.epoch_idx += 1#@title `DemoCb`
class DemoCb(pl.Callback):
def __init__(self, env_name, dirpath, every_n_epochs):
self.env_name = env_name
self.every_n_epochs = every_n_epochs
self.dirpath = dirpath
self.env = Env(env_name=env_name, render=True, dirpath=dirpath)
def on_fit_end(self, trainer, pl_module):
checkpoints = sorted(glob(f'{self.dirpath}/*.ckpt'), key=os.path.getmtime)
agents = list(map(Agent.load_from_checkpoint, checkpoints))
for agent in tqdm(agents, desc='Running demo...'):
self.env.run_agent(agent)
videos_path = sorted(glob(f'{self.dirpath}/*.mp4'), key=os.path.getmtime)
videos = map(media.read_video, videos_path)
keys = [f'epoch={(i+1) * self.every_n_epochs}' for i in range(len(videos_path))]
media.show_videos(dict(zip(keys, videos)), fps=30, codec='gif', border=True, columns=3, height=150)Training
env_name = 'InvertedPendulum-v4'
epochs = 100
lr = 0.003883
use_baseline = True
discount_factor = 0.9
dataset_length = 2500
demo_every_n_epochs = epochs//9
logger = pl.loggers.CSVLogger(env_name)
logger.log_hyperparams({'env_name': env_name, 'use_baseline': use_baseline, 'epochs': epochs, 'lr': lr, 'discount_factor': discount_factor, 'dataset_length': dataset_length, 'demo_every_n_epochs': demo_every_n_epochs})
dirpath = f'{env_name}/{logger.name}/version_{logger.version}'
env = Env(env_name=env_name)
agent = Agent(obs_dim=env.obs_dim, act_dim=env.act_dim, lr=lr, use_baseline=use_baseline)
on_policy_dataset = OnPolicyDataset(agent, env, use_advantage=use_baseline, dataset_length=dataset_length, discount_factor=discount_factor)
callbacks=[
TQDMCb(),
LoggerCb(logger),
pl.callbacks.ModelCheckpoint(dirpath=dirpath, every_n_train_steps=demo_every_n_epochs, save_top_k=-1),
DemoCb(env_name=env_name, dirpath=dirpath, every_n_epochs=demo_every_n_epochs),
]
trainer = pl.Trainer(accelerator='cpu',
logger=logger,
max_epochs=epochs,
callbacks=callbacks)
trainer.fit(agent, train_dataloaders=on_policy_dataset)INFO:pytorch_lightning.utilities.rank_zero:GPU available: False, used: False
INFO:pytorch_lightning.utilities.rank_zero:TPU available: False, using: 0 TPU cores
INFO:pytorch_lightning.utilities.rank_zero:IPU available: False, using: 0 IPUs
INFO:pytorch_lightning.utilities.rank_zero:HPU available: False, using: 0 HPUs
INFO:pytorch_lightning.callbacks.model_summary:
| Name | Type | Params
-------------------------------------------
0 | baseline_nn | Sequential | 4.5 K
1 | policy_nn | Sequential | 4.5 K
-------------------------------------------
9.1 K Trainable params
0 Non-trainable params
9.1 K Total params
0.036 Total estimated model params size (MB)
Epoch: 0%| | 0/100 [00:00<?, ?it/s]
INFO:pytorch_lightning.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=100` reached.
Running demo...: 0%| | 0/9 [00:00<?, ?it/s]
epoch=11  | epoch=22  | epoch=33  |
epoch=44  | epoch=55  | epoch=66  |
epoch=77  | epoch=88  | epoch=99  |
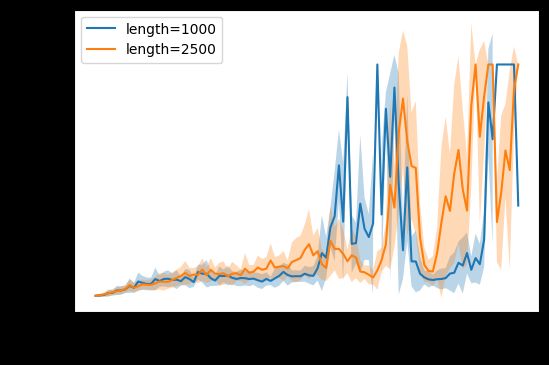
Ploting
log_folders = glob(f'{env_name}/**/*')
plt.figure(dpi=100)
for folder in log_folders:
df = pd.read_csv(f'{folder}/metrics.csv')
hyper_params = yaml.safe_load(open(f'{folder}/hparams.yaml'))
rewards_mask = df.columns.str.contains('rewards/')
rewards = df.iloc[:, rewards_mask]
r_means = rewards.mean(axis=1)
r_std = rewards.std(axis=1)
plt.plot(r_means, label=f'length={hyper_params["dataset_length"]}')
plt.fill_between(df.index, r_means - r_std, r_means + r_std, alpha=.3)
plt.xlabel('epochs')
plt.ylabel('rewards')
plt.legend(loc='upper left');